ロボットハンド
ワーク取出し、搬送、交換。
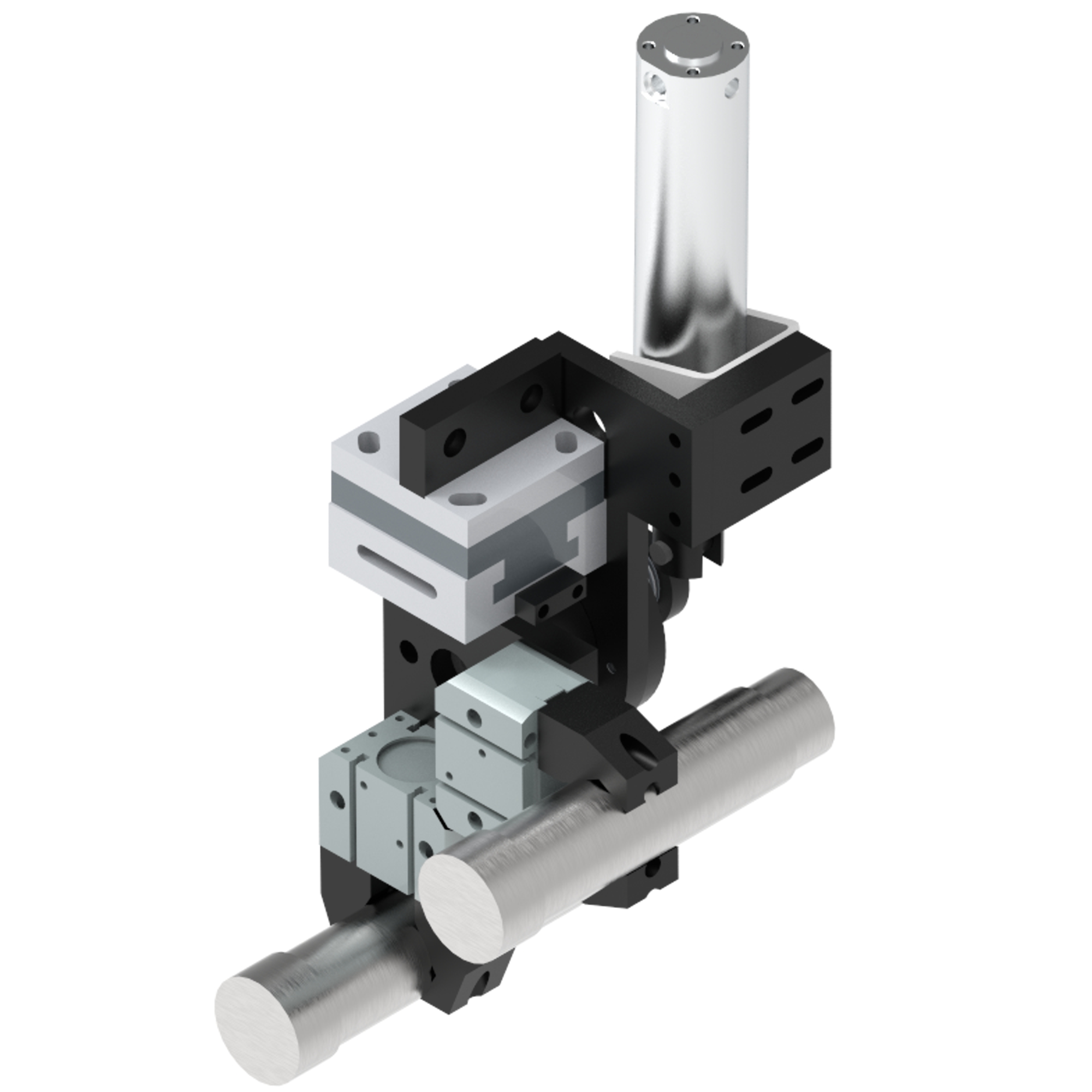
スイングモーション シリンダ機構ハンド
ロボットのワーク取りや搬送機構。
機能・特徴:
⇒平行グリッパーとシリンダー機構、スイング式90°
⇒棒状ワーク対応、単グリッパー荷重3~15kg。
⇒大型、特殊形状ワークの場合、カスタマイズで対応する。

No. 301, Sec. 2, Xinzhuang St., Longjing Dist., Taichung City 434006, Taiwan (R.O.C.)
TEL:04-2652-9558
FAX:04-2652-9557
Email:liaoyc@ms2.hinet.net